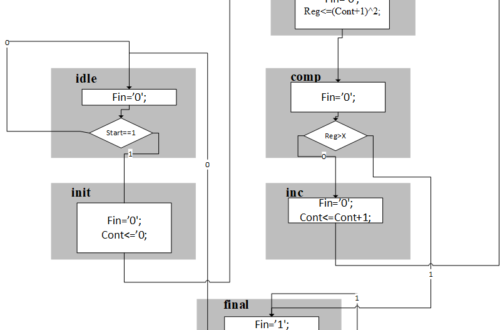
Paso 3: Realización de la segmentación
Partimos por tanto de la siguiente descripción. Nuestra intención es ahora hacer la segmentación de esta descripción algorítmica escrita en SystemVerilog.
module sed2(
CLK,
START,
RESET,
X,
FIN,
COUNT
);
input wire CLK;
input wire START;
input wire RESET;
input wire [7:0] X;
output logic FIN;
output logic [3:0] COUNT;
enum logic [2:0] {idle,comp,inc,No_inc,finali} state;
logic [3:0] Cont;
logic start;
logic [3:0] Sal;
logic [8:0] Reg;
logic [8:0] X_reg;
assign start=START;
always_ff @(posedge CLK, negedge RESET)
if (!RESET)
begin
Reg<='0;
Cont<='0;
Sal<='0;
X_reg<='0;
state<=idle;
end
else
case (state)
idle: if (start)
begin
Sal<='0;
Reg<=8'b1;
X_reg<=X;
Cont<='0;
state<=comp;
end
else
state<=idle;
comp:
begin
Cont<=Cont+1;
if (Reg>X)
state<=No_inc;
else
state<=inc;
end
inc:
begin
Sal<=Sal+1;
if (Cont==15)
state<=finali;
else
begin
Reg<=(Sal+2)**2;
state<=comp;
end
end
No_inc:
begin
Sal<=Sal;
if (Cont==15)
state<=finali;
else
state<=comp;
end
finali:
if (!start)
state<=idle;
else
state<=finali;
endcase
assign COUNT=Sal;
always_comb
case (state)
finali: FIN=1'b1;
default: FIN=1'b0;
endcase
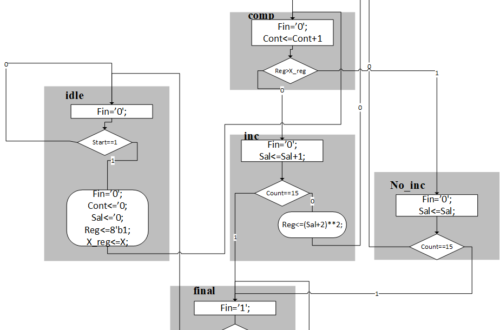
endmoduleEl procedimineto de segmentación lo podemos observar en el siguiente vídeo
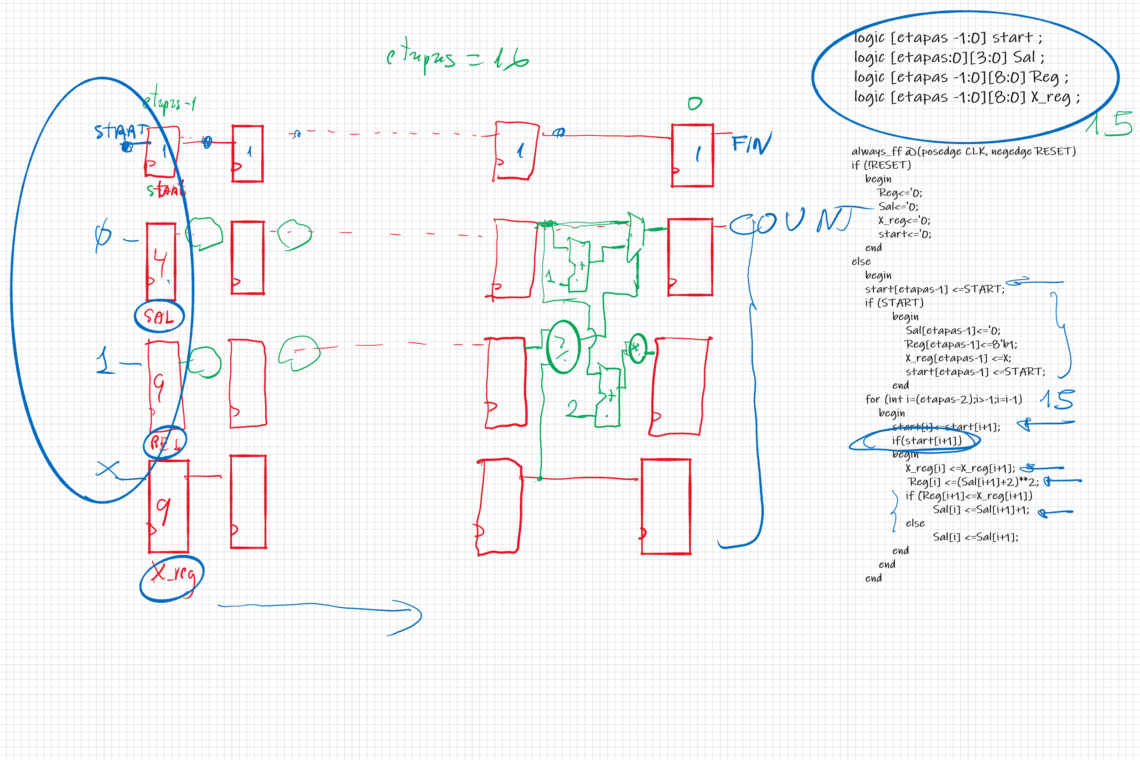
Mostramos ahora el resultado de nuestra segmentación:
module sed2_seg(
CLK,
START,
RESET,
X,
FIN,
COUNT
);
parameter tamano=4;
localparam etapas= 2**tamano;
input wire CLK;
input wire START;
input wire RESET;
input wire [7:0] X;
output logic FIN;
output logic [3:0] COUNT;
logic [etapas -1:0] start ;
logic [etapas -1:0][3:0] Sal ;
logic [etapas -1:0][8:0] Reg ;
logic [etapas -1:0][8:0] X_reg ;
always_ff @(posedge CLK, negedge RESET)
if (!RESET)
begin
Reg<='0;
Sal<='0;
X_reg<='0;
start<='0;
end
else
begin
start[etapas-1] <=START;
if (START)
begin
Sal[etapas-1]<='0;
Reg[etapas-1]<=8'b1;
X_reg[etapas-1] <=X;
start[etapas-1] <=START;
end
for (int i=(etapas-2);i>-1;i=i-1)
begin
start[i]<=start[i+1];
if(start[i+1])
begin
X_reg[i] <=X_reg[i+1];
Reg[i] <=(Sal[i+1]+2)**2;
if (Reg[i+1]<=X_reg[i+1])
Sal[i] <=Sal[i+1]+1;
else
Sal[i] <=Sal[i+1];
end
end
end
assign FIN=start[0];
assign COUNT=Sal[0];
endmoduleVeamos ahora las prestaciones en área y velocidad conseguidas por esta segmentación realizada. De paso observaremos que nuestros bancos de verificación, si son lo suficientemente robustos, pueden adaptarse al diseño multiciclo original o a la solución pipeline final.